System requirement: Android/ DJI SDK/ OpenCV
Abstract:
This thesis presents a method that utilizes an Unmanned Aerial Vehicles (UAV), commonly called a “drone”, with a camera to fly over a small area of a playground in order to detect a red circular object using image processing techniques.
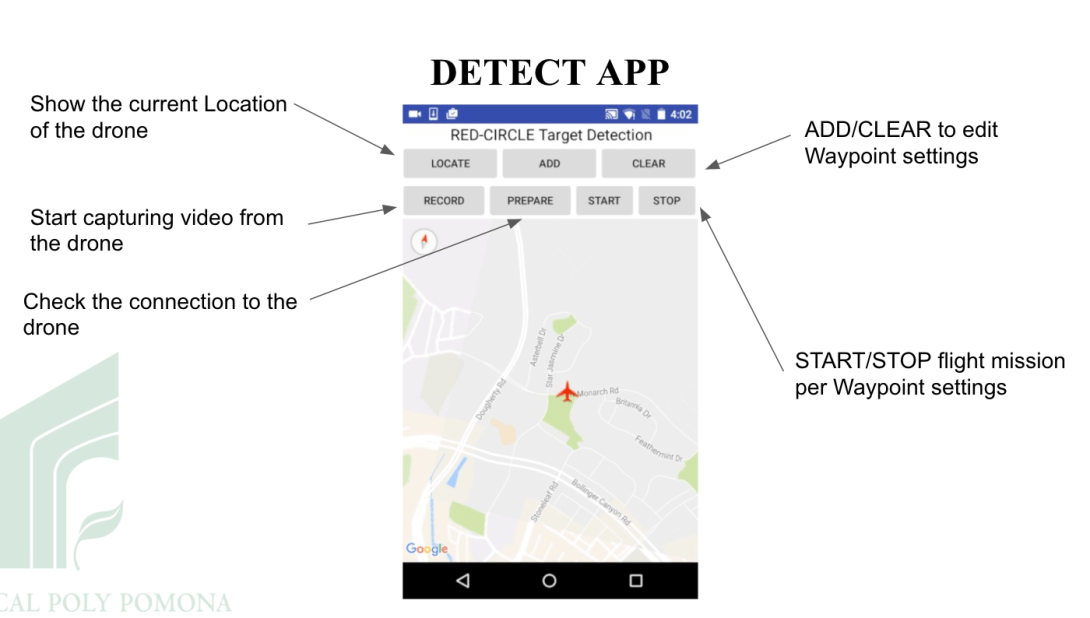
The solution consists of a custom Android mobile application that sets the waypoints for the drone while capturing video and GPS coordinates.
The system utilizes OpenCV library to process the images from the drone in order to alert human operator with the relevant image along with the drone’s approximate location when the image was captured.


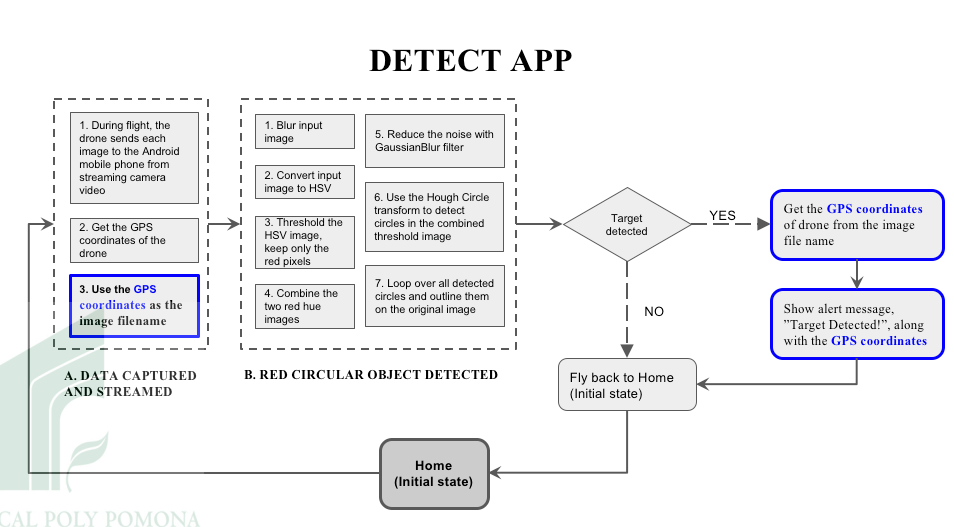
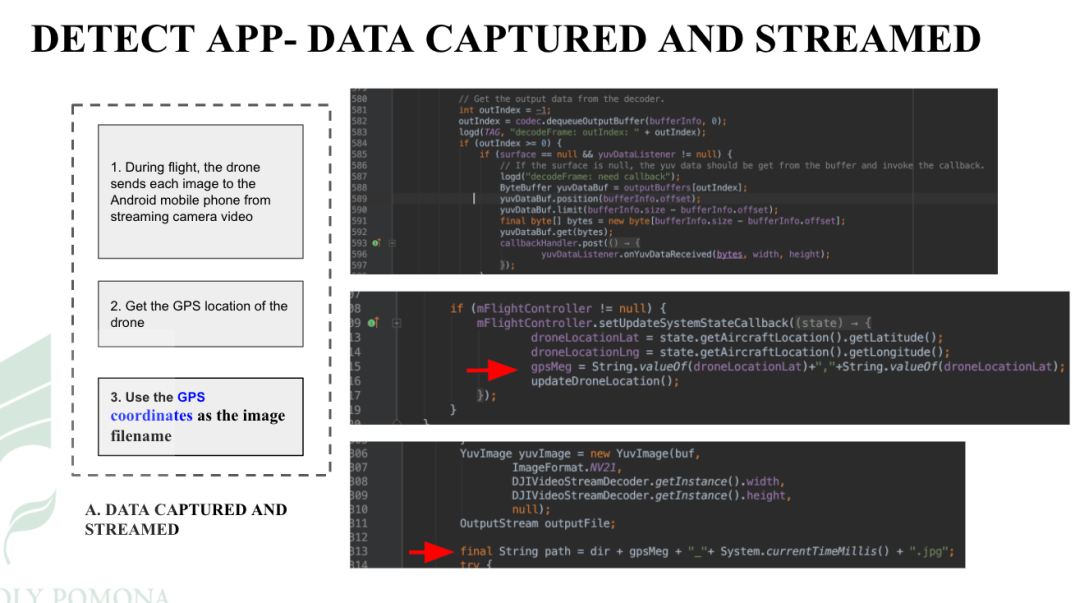
Data captured and streamed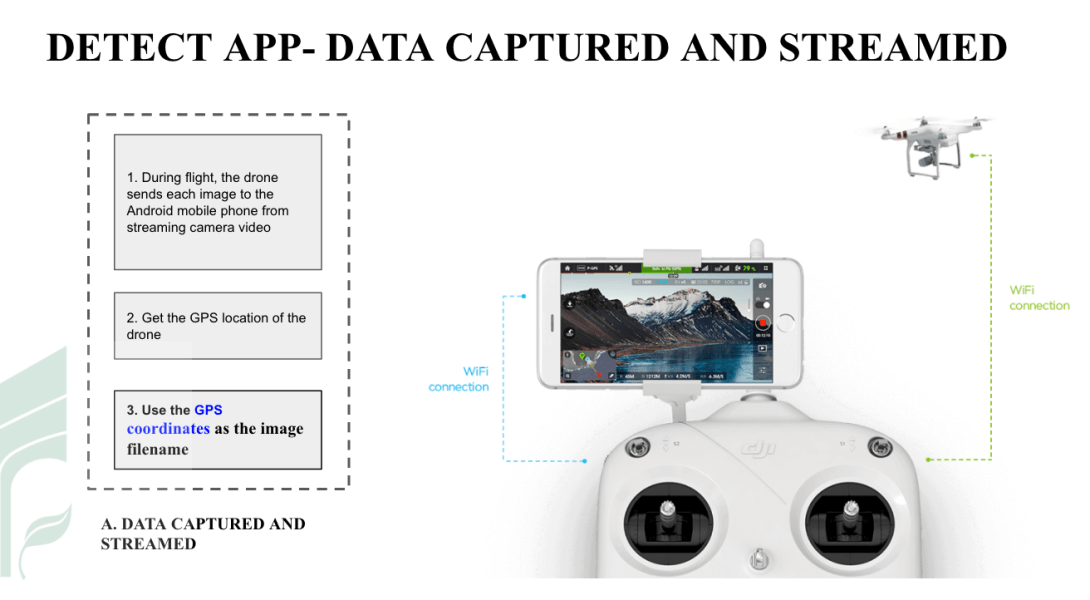 (*The right-hand side picture is from DJI website )
(*The right-hand side picture is from DJI website )
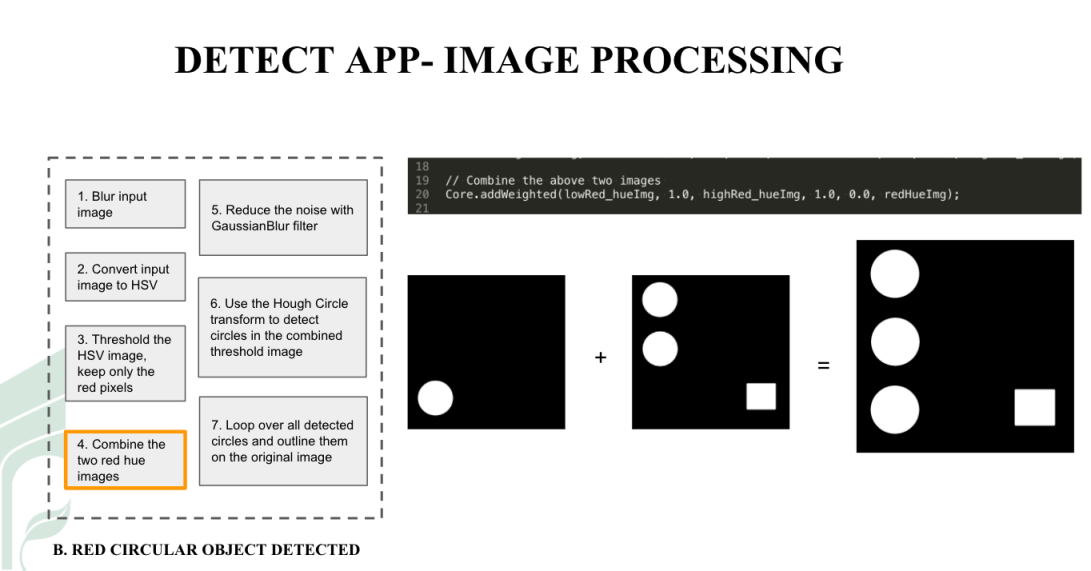
RED circular object detected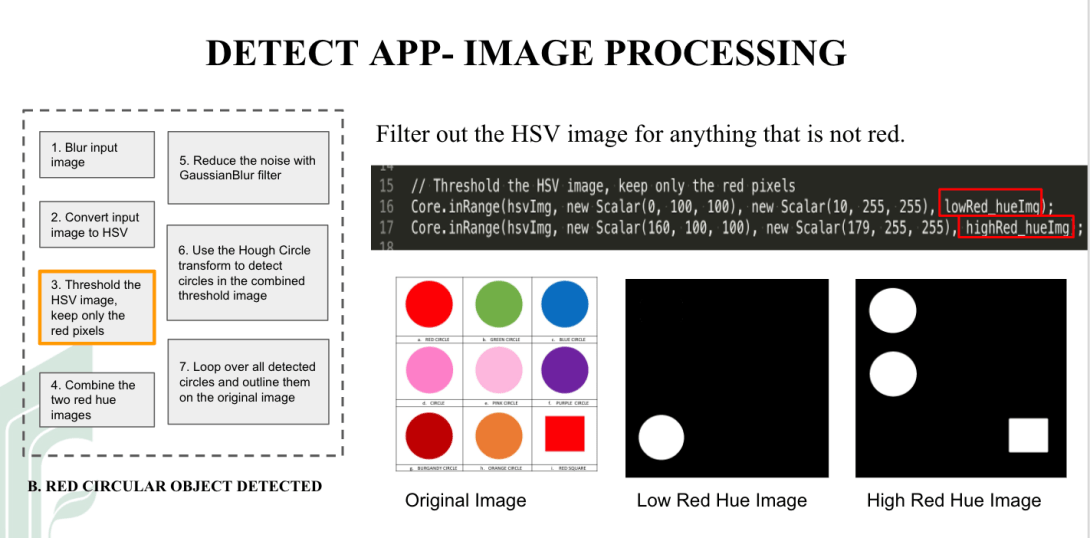
Target detected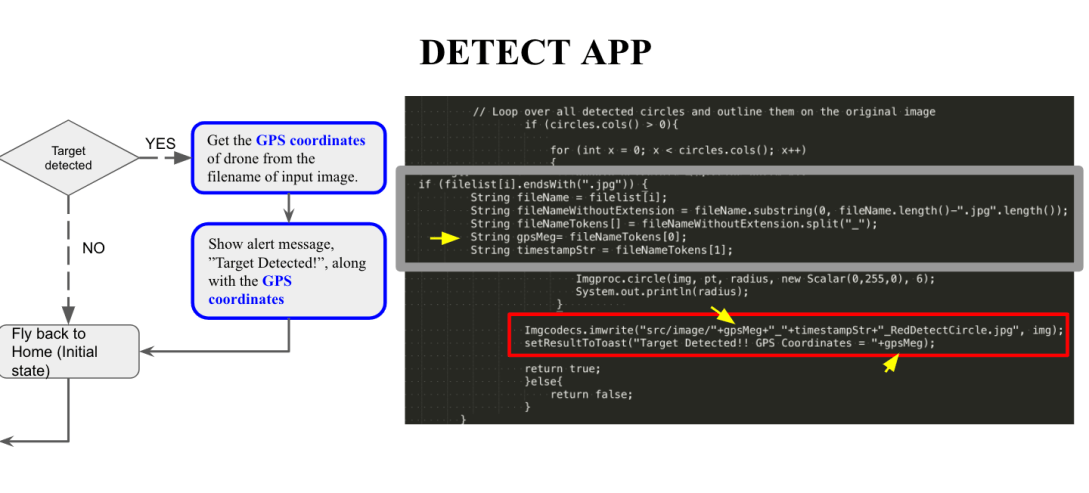
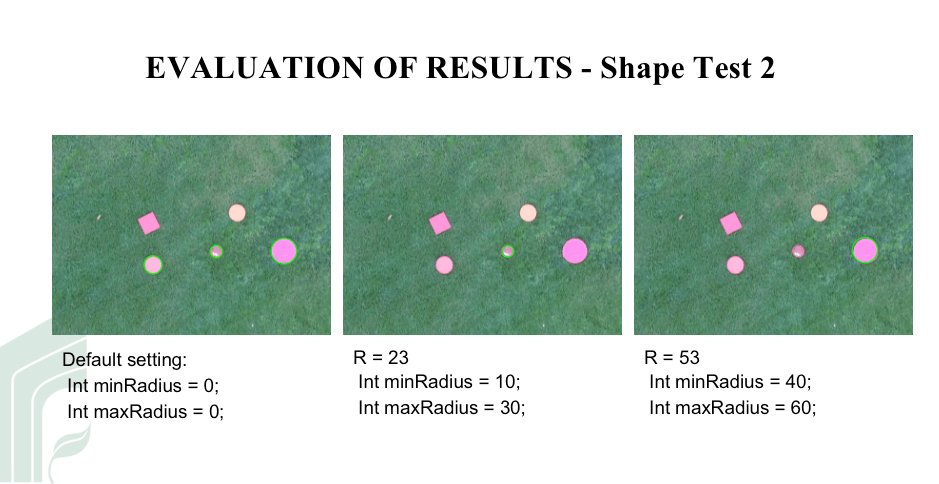
Test case